Refueling Machine
This research deals with the suppression of the vibrations experienced by the nuclear fuel rods during a refueling process in a nuclear reactor. During a refueling process, a refueling machine (i.e., an overhead crane) is required to transport the master fuel assembly (MFA) from given locations (i.e., reactor core) to the target position (i.e., the fuel upender) and vice versa in the minimum time. The transportation of the MFA takes place in water to prevent transference of the radiation to the environment. It has been observed, however, that the MFA starts to vibrate (i.e., manifest end-point oscillations) on reaching the target location, causing an undesirable delay in the operation and affecting the system’s performance in terms both of productivity and of safety. The main research issue here is the fact that the considered object is moved in water, thus making for a highly damped system. It is expected that the load’s vibratory response in water would be quite different from that in air. Therefore, it is required first to investigate the underwater characteristics of the system by experimentation as well as simulation (i.e., theoretically), and then to design an appropriate control scheme for the suppression of residual MFA vibrations in view of the hydrodynamic effects of the water.
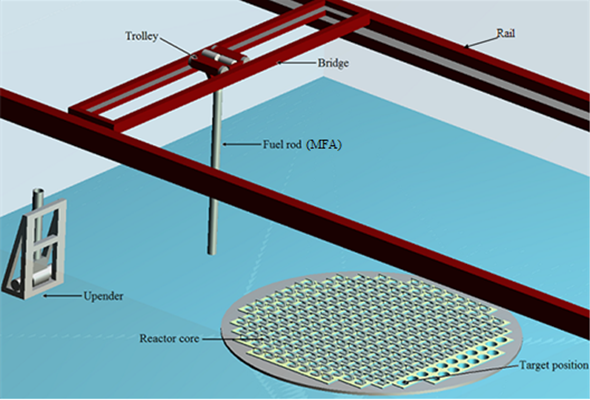
[Underwater transport of the MFA by using the refueling machine]
Mathematical Modeling
Our main research focus is to develop an accurate plant model that can be used for designing an appropriate control law for suppressing the residual vibrations of the MFA. In developing the mathematical model, the MF is assumed to be an Euler-Bernoulli beam with the circular cross-section moving in water. Furthermore, the hydrodynamic force acting on the rod, as a result of the fluid-structure interaction, and the resistance to oppose the motion of the rod offered by the surrounding water is also considered in obtaining the equations of motion. Two different configurations of the rod’s attachment with the trolley are considered (i.e., pin-joint and fixed), resulting in two different models of the system. For the pin-joint configuration, system’s model is developed in terms of ordinary differential equations, which is used in analyzing the rod’s sway response while neglecting its own deflection. Whereas for the fixed-rod configuration, the system’s model is developed in terms of both the ordinary and partial differential equations, which is utilized in analyzing the underwater transverse deflection of the rod due to trolley movement. Experimentation has been carried out to validate the proposed models.
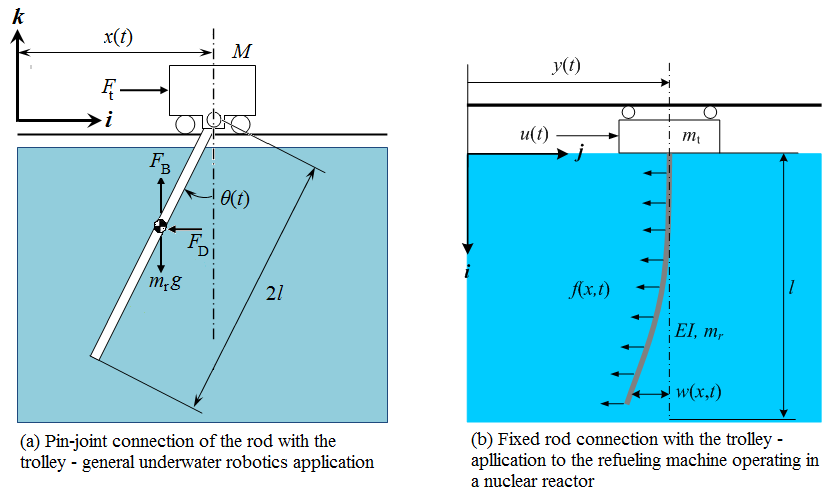
[System schematics: a) The pin-joint and b) the fixed connection of the rod with the trolley]
Control Development
Input shaping, being the most applicable crane control technique, is considered for the residual vibration suppression of the rod. Our investigations reveal that implementation of existing input shaping method does not effectively suppress the residual vibrations of the rod in water. This is due to the hydrodynamic force, which acts on the rod during its transport. Therefore, new command shaping methods for suppressing the rod’s residual vibrations in water is developed.
Underwater sway suppression
Our investigations reveal that the shaped velocity profiles obtained by the zero-vibration (ZV) and zero-vibration derivative (ZVD) controls of the crane working in the air did not work in water. This is due to the fact that a sudden change of bridge velocity in air will bring a quick change of load in air, but not in water. Therefore, the input shaping technique in water needs to be modified in such a way that the shaped velocity profile increases (or decreases) gradually from one velocity level to another, resulting in an improved underwater rod response. Experimental results confirmed that the modified shaped command profile successfully suppresses the residual vibration of the system considered.
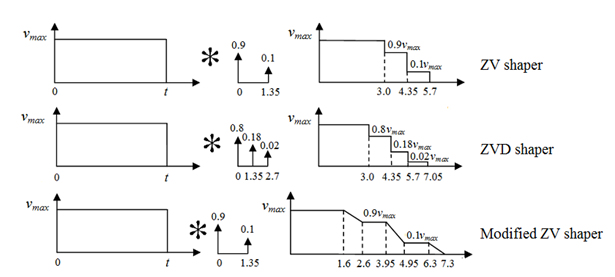
[Input shapers]
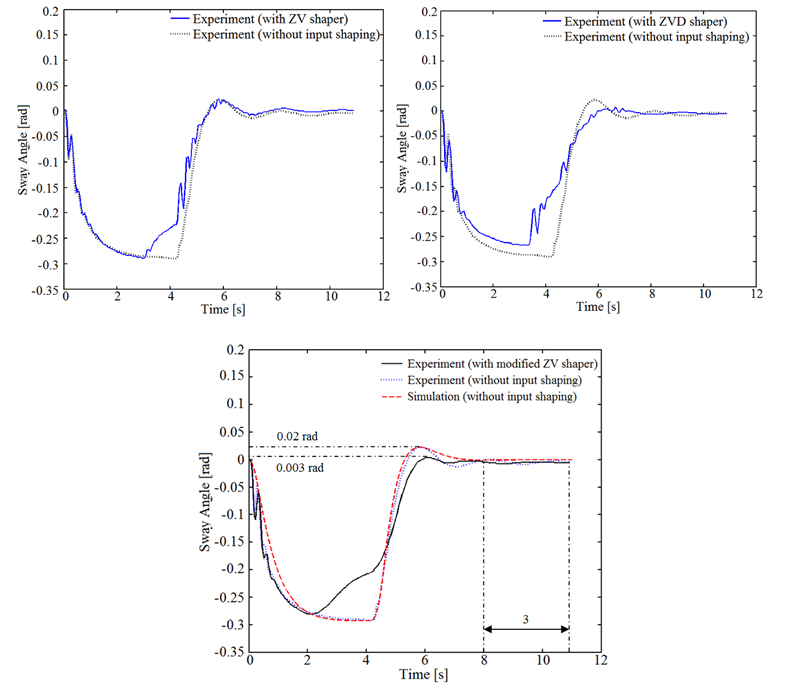
[Sway responses for the MFA for the ZV, ZVD and the proposed modified ZV shaper]
For more details: Shah, U. H. and Hong, K.-S., “Input shaping control of a nuclear power plant's fuel transport system,” Nonlinear Dynamics , Vol. 77, No. 4, pp. 1737-1748, September 2014.