MULTIPLE-VEHICLES MOTION PLANNING
The scenario of multi-vehicles motion planning can be described as follows. Suppose that there exist a group of vehicles starting from their pre-defined initial configurations. They have to reach their own goals in minimum possible time without any collision. In this scenario, we focus on the collision-free motion planning such that the achieving time of the slowest vehicle can be minimized.
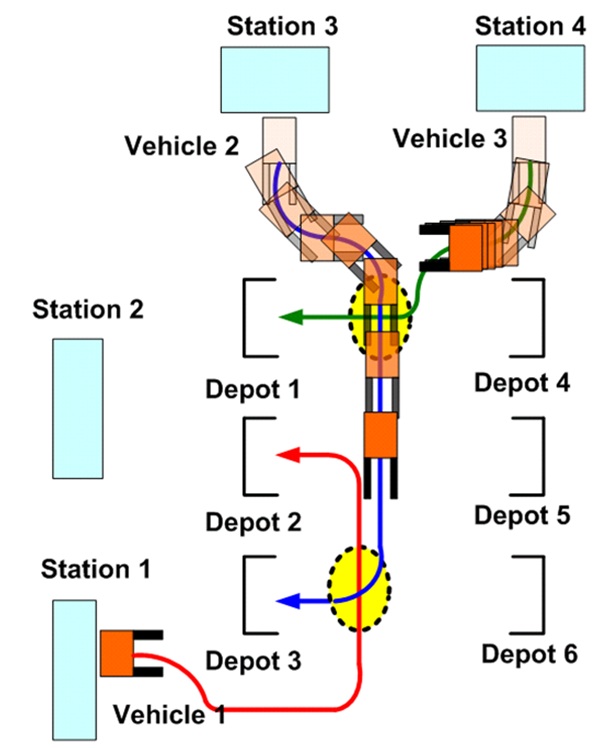
[Scenario of Multi-Vehicle Motion Planning]
In this research, the following constraints are considered:
a. Maximum linear velocity
b. Maximum tangential acceleration
c. Maximum radial acceleration
Simulations were established for maximum velocity = 4 m/s, maximum tangential acceleration = 2 m/s2 , and maximum radial acceleration = 4/m2
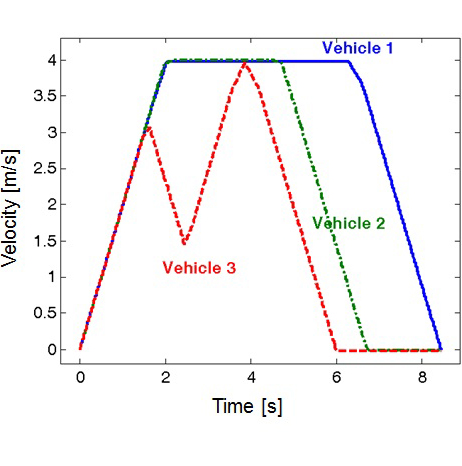
[Velocity Profile]
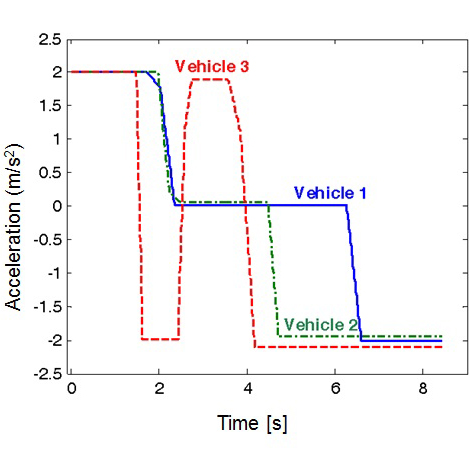
[Acceleration Profile]