ROBOTICS
This research substance focuses on the development of autonomous navigation technologies for an unmanned vehicle which include the following topics:
Navigation function-based control of multiple wheeled vehicles
In this paper, a collision-free navigation method for a group of autonomous wheeled vehicles is investigated. The position and orientation information of individual vehicles is transformed to navigation variables, which are the distance left to the goal position, the angle made by the orientation of the vehicle at the goal position and the vehicle-to-target (v-to-t) vector, and the angle made by the heading direction of the vehicle and the v-to-t vector. As a Lyapunov function for deriving a smooth control law that drives all the vehicles from an initial configuration to a goal configuration, a new navigation function that incorporates the squared norm of the navigation variables, the boundaries of collision-free areas, and the angles made by the vehicle heading direction and the vehicle-to-obstacle (v-to-o) vectors is proposed. The asymptotic stability of the closed-loop system is proved.
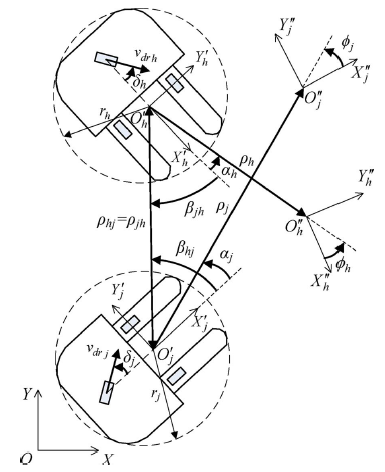
[Conflict scenario of two forklifts]
The effectiveness of the developed algorithm is illustrated through three simulations (three vehicles in a free environment, three vehicles in the presence of a static obstacle, and eight vehicles operating along a corridor) and two experiments (static and moving obstacles avoidance). The proposed algorithm has been implemented on a real forklift and the navigation of the forklift from an arbitrary initial configuration to a goal configuration while avoiding collisions has been demonstrated.
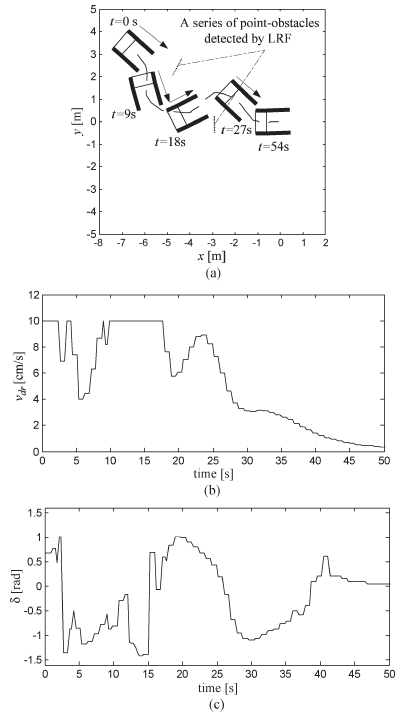
[Experimental results of reaching target while avoiding static obstacles]
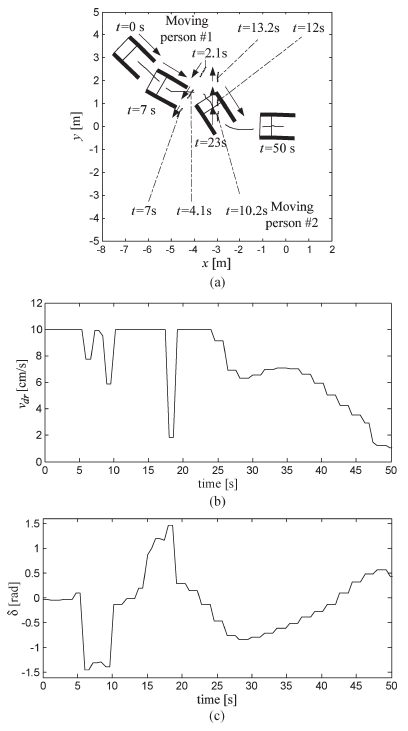
[Experimental results of reaching target while avoiding two moving persons]
For more details, see “A Navigation Function-Based Control of Multiple Wheeled Vehicles,” IEEE Transactions on Industrial Electronics, Vol. 58, No. 5, pp. 1896-1906, May 2011.
Intelligent motion control
This research aims to develop the core technologies for the navigation and control of unmanned vehicle by considering the vehicles dynamics, disturbances (tire-road slip, aerodynamic force, etc.), and parameter uncertainties during its motion. The systems are treated as unknown to accommodate for the situations of unknown and changing payloads, and to develop the most possible practical controller.
[Kinematics modeling and path following control scheme]
Real-time motion planning and decision making
Lorem ipsum dolor sit amet, facilis ocurreret vim ei, id sea magna populo sanctus. Ut usu altera phaedrum, ceteros albucius at eos. Ad prima ubique oblique ius. Vel no dolorem iudicabit consetetur. Vis tibique convenire ad, sit et erat congue euismod. Pri an noster placerat, in appareat abhorreant eloquentiam usu, qui ei sale scripta fuisset. Ridens officiis deterruisset eam id, usu et sanctus definitiones, alia elaboraret per ei. Pri epicurei recteque theophrastus eu, est clita platonem et. Est et essent eirmod, et has decore adolescens, eam et nibh sanctus. Alterum denique propriae ut cum, ut suas dicunt percipit sea, per ut sint augue.
[Control scheme for autonomous unmanned vehicle]
High precision localization and map generation
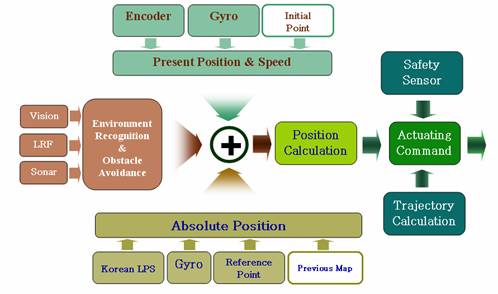
In this research, the sensor fusion algorithm for localization and map building will be investigated and verified experimentally to obtain a high precision and improved system performance. Along with the investigation on the localization and map generation algorithms, the global path planning for the vehicles motion on its workspace will be also developed.
Vision-based moving objects detection and environment recognition
On this stage, our efforts will be devoted to explore the features of space obtained by vision system for the development of environment recognition and surveillance system. The research scope includes the development of vision-based moving object detection and target tracking, development of intelligent surveillance system, and sensor-based environment recognition technologies.
Cooperative control techniques for multiple autonomous unmanned vehicles
The cooperative control problem is basically related with the requirement for the integration between communication, computation, and feedback control scheme in a distributed fashion. This project substance aims to develop safe and efficient cooperative control techniques for multiple vehicles operation to achieve the common goal. The research scope will include path planning technique, dynamic obstacles avoidance method, vehicle to vehicle communication technique, and supervisory control for decision making of multiple unmanned vehicle operation in an unstructured environment.
[Cooperative control of multi vehicles]
Autonomous navigation techniques for unmanned vehicles for material handling
This research develops a control system for an unmanned autonomous forklift that is designated to operate in an unstructured environment. The autonomous forklift was modified from the conventional forklift (manned forklift) and several sensors have been attached, such as SICK LRFs for obstacle detection and mapping, cameras for object recognition and surveillance, ultrasonic satellite (USAT) for position, gyro for orientation measurement, and an industrial PC with analog to digital/digital to analog (AD/DA) converter as the main controller.
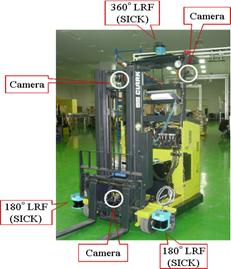
[Autonomous forklift platform]
The research consists of four main sub-categories, which are the development of the control and an obstacle avoidance algorithm, the establishment of central networking systems, development of vision system, map building, and localization. A path following controller is designed to stabilize the vehicle following a specified path. An optimal maneuver in the presence of obstacles is considered. A precise unloading position estimation technique will be also developed for unmanned autonomous forklifts to be able to engage pallets automatically. To recognize the vehicle navigation space, a 3D map building technique and an intelligent surveillance technique based on PTZ cameras will be designed and implemented. For efficient real-time autonomous navigation, a dynamic path planning technique for multiple vehicles and a robust obstacle detection technique based on vision will be developed. A high precision and practical localization technique for indoor and outdoor operation will be also developed.
[Research objectives (1) safe motion control with obstacle avoidance ability, (2) central communication, and (3) pallet and environment recognition.]