The Integrated Dynamics & Control Engineering Laboratory (IDCEL) and Cogno-Mechatronics Laboratory led by Professor Keum-Shik Hong at Pusan National University (PNU) has been working on various research areas related to brain engineering, control, and robotics systems. The IDCEL was designated as a
National Research Laboratory (NRL) by the Ministry of Education, Science and Technology (MEST), Korea, in 2003. The development of unmanned autonomous vehicles, automated super-size container cranes, and a mobile harbor is a part of the grand project of establishing Busan as a maritime logistic hub-port in Northeast Asia. The Cogno-Mechatronics Lab was established in 2009 with the support of
World Class University (WCU) Program funded by the MEST, Korea. In brain engineering, the development of a real-time multi-modality imaging technology has been a focus. Extensive efforts in research are being put to cope with challenges, in which a board range of disciplines are involved, including brain imaging, brain-machine interface, control theory, vibration control, and robotics.

[February 2016]

The
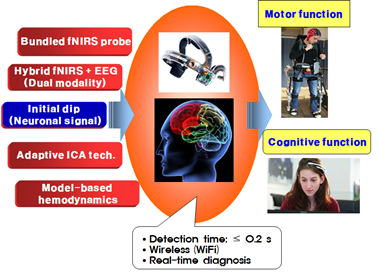
brain engineering team is working on development of
real-time diagnostic system for motor and cognitive function recovery. Hardware is being developed for real-time multi-modality imaging system to achieve the objectives. The hardware consists of
LED-based wireless-fNIRS system with multiple wavelengths to observe changes in hemodynamic responses. The
multi-modality imaging is being done by combining the wireless fNIRS system with EEG. Along with brain imaging, research is also being carried out on
hybrid EEG-fNIRS based
brain-computer interface (BCI) for communication and control. The focus of this research is the reduction of inherent time delay between the two modalities for BCI applications. Moreover, the hybrid system is being used to
control a quadcopter in real-time with enhanced accuracy and increase number of control commands. Also, BCI research on the
detection and classification of initial dips is being carried out to for the early detection of fNIRS signals. In order to remove noise in fNIRS signals, the research team is developing different adaptive noise removal techniques (e.g., adaptive-ICA etc.). To improve the spatial resolution of fNIRS system,
bundled-optode method is developed using continues-wave fNIRS system. The method is applied for the reconstruction of the
3D brain images using fNIRS.
The hemodynamic signal acquired from fNIRS data is contaminated with different
physiological noises (e.g. heartbeat, respiration, low frequency oscillation etc.) as well as motion artifacts. In order to remove these unwanted signals from the data, we are working on developing different methods. One approach is the use of ICA to separate and remove these noises for the acquisition of better tomographic and topographic brain images. Other methods like adaptive filtering (Kalman filter, Linear parameter varying models etc.) are also studied and applied for the noise removal.
State-space model based approaches are applied on different brain areas for the investigation of differences in the hemodynamic responses. The performance of these algorithms is tested using general linear model based statistical analysis. In this lab, the strategy is to develop an algorithm that can remove the noises in real-time. Also, the algorithms are being designed for the development of real-time brain images.
We are currently working on the development of
hybrid EEG-fNIRS system. The purpose of integrating two modalities is to improve the spatial and temporal resolution of the acquired brain activity. Also, software for simultaneous acquisition of EEG and fNIRS signals is being developed in the lab. The research on hybrid EEG-fNIRS also includes the reduction of inherent time delay between the two modalities for BCI applications. Moreover, we are trying to improve the classification accuracy as well as the number of active control commands using the hybrid system. For BCI, our goal is to apply the EEG-fNIRS system for the control of external devices (e.g. robots, quadcopter etc.). The detection of precise brain area during active and resting states using the hybrid system is also part of our objective. Our focus in this research area is to acquire simultaneous features from EEG and fNIRS for real-time brain monitoring and diagnosis.
For quick detection of fNIRS signal, we are investigating the early deoxygenation phenomenon, also referred to as the “fast response” or “initial dip,” in fNIRS signals.
The initial dip is the small increase in the concentration of deoxygenation (or decrease in oxygenation) immediately after the stimuli is given. An initial dip is faster than the conventional hemodynamic response, and also more spatially specific. In our lab, we are working on the development of new techniques for the detection of initial dips and a further reduction of the detection time in order to use fNIRS for real-time BCI.
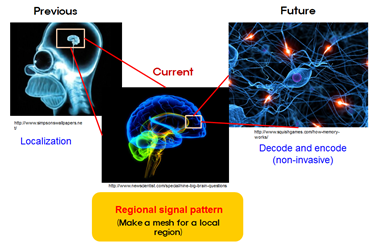
In order to improve the spatial resolution of fNIRS, we have focused on the
bundled-optode method. We are analyzing of multiple brain images by varying the inter-optode distances. We are generating the brain activity in multiple layers that are reconstructed to form a
3D brain image. Currently, we are focusing on the development on the generation of real-time 3D brain images for the diagnosis of multiple brain areas.
[Toward a mobile real-time brain imager]
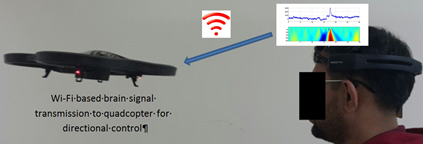
[Brain-controlled drone]
[Brain engineering: 3-D brain images using bundled optodes scheme]
Mobile harbor that can approach to an anchored ship to load/unload containers at sea regardless of the water depth is the next generation of the maritime container transport solution. In the development of the mobile harbor technologies, the team has established anti-sway and anti-skew control for an offshore container crane. The research on
multiple autonomous vehicles operation for material handling industry has also been focused. The team has developed two autonomous vehicles (AMS and CLARK Forklifts) which are equipped with localization, mapping, laser-range-finder, vision, sensor-fusion, and communication systems. A number of experiments for verifying the proposed robust configuration control, path/trajectory tracking control, obstacle avoidance, visual servoing, and visual mapping have been conducted. The team currently moves forward to the multiple autonomous vehicles technologies which perform high speed navigation, precise trajectory tracking control, and cooperative operation including task assignment, conflict resolution, and coordination of multiple vehicles.

[Autonomous vehicles operation for material handling]
In
vibration control area, the main research focus is the development of mathematical models and control schemes for suppression of vibrations experienced by the nuclear fuel rods during a refueling process in the reactor. A refueling machine (i.e., an overhead crane) is required to transport the master fuel assembly (MFA) from given locations (i.e., reactor core) to the target position (i.e., the fuel upender) and vice versa in quick time. The transportation of the MFA takes place in water to prevent transference of the radiation to the environment. However, quick maneuvering of the MFA in water can generate hydrodynamic force causing large deflections that can damage the fissile material within. Certainly, insertion of damaged fuel rods into a reactor incurs a very serious safety hazard. Such hazard, indeed, is all the more serious when considering the fact that the available input-shaping techniques cannot suppress the residual vibrations of the MFA in water. In developing the mathematical model, the refueling machine is considered as a hybrid system consisting of a lumped-mass trolley system and a flexible MFA system that exhibits transverse displacement in water. Furthermore, a new input-shaping control law that satisfies the maximum deflection constraint during transference and effects the minimal residual MFA vibration at the target position in a nuclear reactor has been developed.
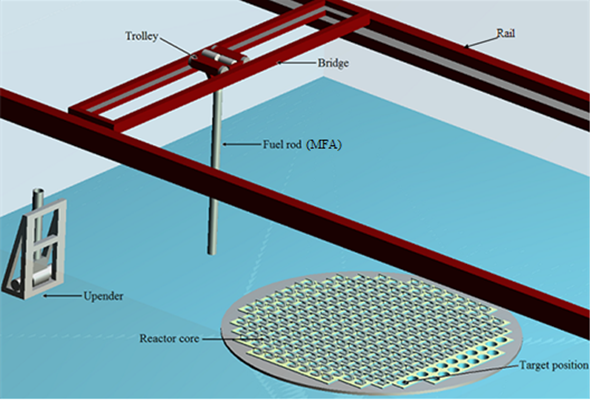
[Model of nuclear fuel rod transportation system]
[Other research subjects during the past 23 years]
Our laboratory is always open for academic exchanges and consultations. We welcome you warmly if you are interested in visiting our laboratory.
Thank you very much.
Professor Keum-Shik Hong